
La estructura y el diseño de un vehículo eléctrico puro es diferente al de un vehículo tradicional con motor de combustión interna. También es una ingeniería de sistemas compleja. Necesita integrar la tecnología de baterías, la tecnología de accionamiento de motores, la tecnología automotriz y la teoría de control moderna para lograr un proceso de control óptimo. En el plan de desarrollo de ciencia y tecnología de vehículos eléctricos, el país continúa adhiriéndose al diseño de I+D de "tres verticales y tres horizontales", y destaca además la investigación sobre tecnologías clave comunes de "tres horizontales" de acuerdo con la estrategia de transformación tecnológica de "propulsión eléctrica pura", es decir, la investigación sobre el motor de propulsión y su sistema de control, la batería de energía y su sistema de gestión y el sistema de control del tren motriz. Cada fabricante importante formula su propia estrategia de desarrollo empresarial de acuerdo con la estrategia de desarrollo nacional.
El autor clasifica las tecnologías clave en el proceso de desarrollo de un sistema de propulsión de nueva energía, proporcionando una base teórica y una referencia para el diseño, prueba y producción del sistema de propulsión. El plan se divide en tres capítulos para analizar las tecnologías clave de propulsión eléctrica en la cadena cinemática de los vehículos puramente eléctricos. Hoy, primero presentaremos el principio y la clasificación de las tecnologías de propulsión eléctrica.
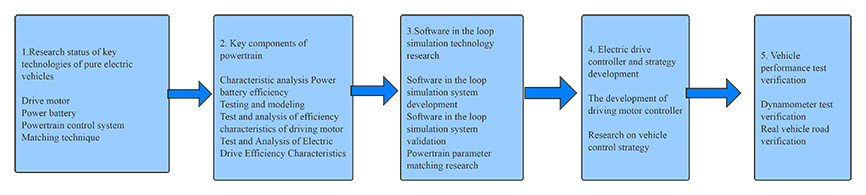
Figura 1 Vínculos clave en el desarrollo del sistema de propulsión
En la actualidad, las principales tecnologías clave del sistema de propulsión de vehículos eléctricos puros incluyen las siguientes cuatro categorías:
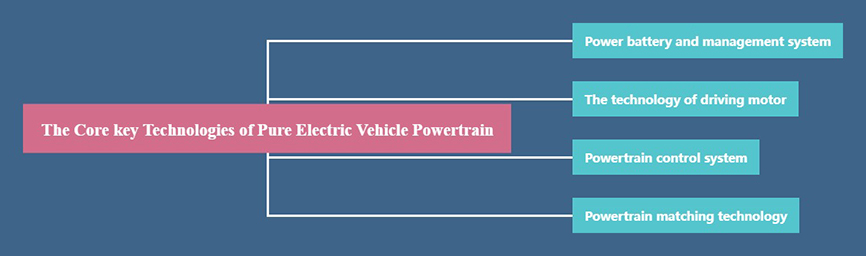
Figura 2 Las tecnologías clave del tren motriz
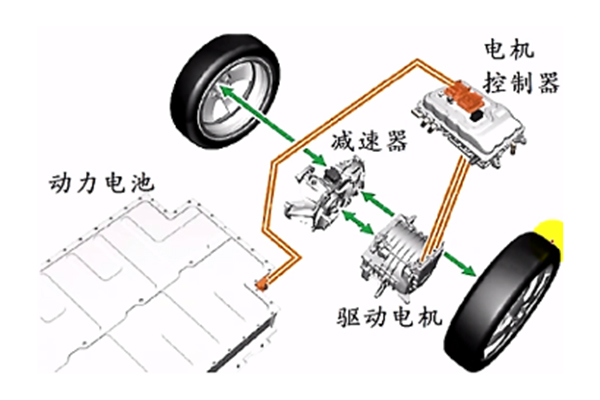
La definición de sistema motor impulsor
De acuerdo con el estado de la batería del vehículo y los requisitos de energía del vehículo, convierte la energía eléctrica producida por el dispositivo de generación de energía de almacenamiento de energía a bordo en energía mecánica, y la energía se transmite a las ruedas motrices a través del dispositivo transmisor y a las partes. La energía mecánica del vehículo se convierte en energía eléctrica y se devuelve al dispositivo de almacenamiento de energía cuando el vehículo frena. El sistema de conducción eléctrica incluye motor, mecanismo de transmisión, controlador del motor y otros componentes. El diseño de los parámetros técnicos del sistema de conducción de energía eléctrica incluye principalmente potencia, par, velocidad, voltaje, relación de transmisión reductora, capacitancia de la fuente de alimentación, potencia de salida, voltaje, corriente, etc.

1) controlador de motores
También llamado inversor, cambia la entrada de corriente continua del paquete de baterías a corriente alterna. Componentes principales:
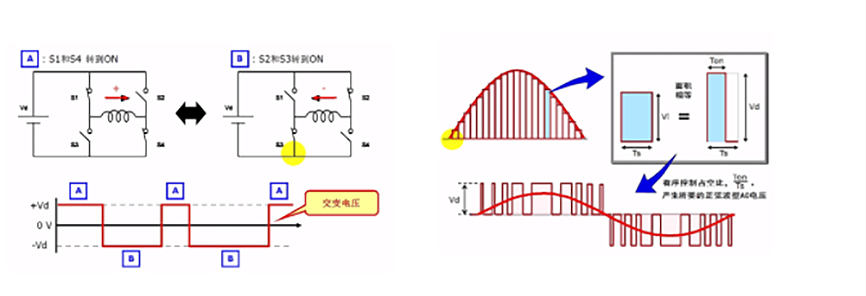
◎ IGBT: interruptor electrónico de potencia, principio: a través del controlador, controle el brazo del puente IGBT para cerrar una determinada frecuencia y un interruptor de secuencia para generar corriente alterna trifásica. Al controlar el cierre del interruptor electrónico de potencia, se puede convertir el voltaje alterno. Luego, el voltaje de CA se genera controlando el ciclo de trabajo.
◎ Capacitancia de película: función de filtrado; Sensor de corriente: detecta la corriente del devanado trifásico.
2) Circuito de control y conducción: tablero de control por computadora, conducción IGBT
La función del controlador del motor es convertir CC en CA, recibir cada señal y generar la potencia y el par correspondientes. Componentes principales: interruptor electrónico de potencia, condensador de película, sensor de corriente, circuito de control para abrir diferentes interruptores, formar corrientes en diferentes direcciones y generar voltaje alterno. Por tanto, podemos dividir la corriente alterna sinusoidal en rectángulos. El área de los rectángulos se convierte en un voltaje con la misma altura. El eje x realiza el control de longitud controlando el ciclo de trabajo y finalmente realiza la conversión equivalente del área. De esta manera, se puede controlar la alimentación de CC para cerrar el brazo del puente IGBT a una frecuencia determinada y cambiar la secuencia a través del controlador para generar alimentación de CA trifásica.
En la actualidad, los componentes clave del circuito de accionamiento dependen de las importaciones: condensadores, tubos interruptores IGBT/MOSFET, DSP, chips electrónicos y circuitos integrados, que pueden producirse de forma independiente pero tienen una capacidad débil: circuitos especiales, sensores, conectores, que pueden ser producido de forma independiente: fuentes de alimentación, diodos, inductores, placas de circuitos multicapa, cables aislados, radiadores.
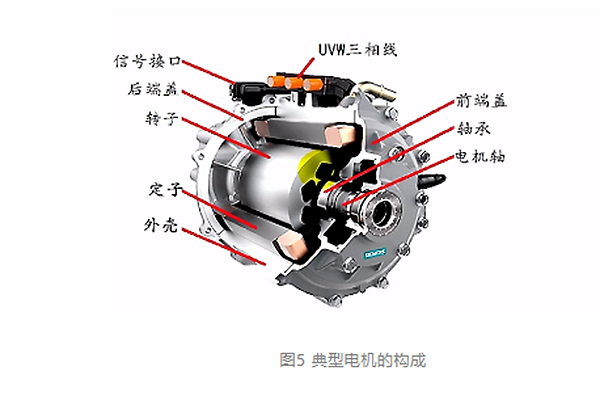
3) Motor: convierte la corriente alterna trifásica en maquinaria.
◎ Estructura: cubiertas, carcasas, ejes y cojinetes de los extremos delantero y trasero
◎ Circuito magnético: núcleo del estator, núcleo del rotor
◎ Circuito: devanado del estator, conductor del rotor
4) Dispositivo transmisor
La caja de cambios o reductor transforma la velocidad de par generada por el motor en la velocidad y el par requerido por todo el vehículo.
Tipo de motor de accionamiento
Los motores de accionamiento se dividen en las siguientes cuatro categorías. En la actualidad, los motores de inducción de CA y los motores síncronos de imanes permanentes son los tipos más comunes de vehículos eléctricos de nueva energía. Por eso nos centramos en la tecnología del motor de inducción de CA y del motor síncrono de imán permanente.
| Motor CC | Motor de inducción de CA | Motor síncrono de imán permanente | Motor de reluctancia conmutada | |
| Ventaja | Menor costo, bajos requisitos del sistema de control | Bajo costo, Amplia cobertura de energía, Tecnología de control desarrollada, Alta confiabilidad | Alta densidad de potencia, alta eficiencia, tamaño pequeño | Estructura simple, bajos requisitos del sistema de control. |
| Desventaja | Altos requisitos de mantenimiento, baja velocidad, bajo par, corta vida útil | Pequeña área eficienteBaja densidad de energía | Alto costo Poca adaptabilidad ambiental | Gran fluctuación de parAlto ruido de trabajo |
| Solicitud | Vehículo eléctrico pequeño o mini de baja velocidad | Vehículos comerciales eléctricos y turismos | Vehículos comerciales eléctricos y turismos | Vehículo de potencia mixta |
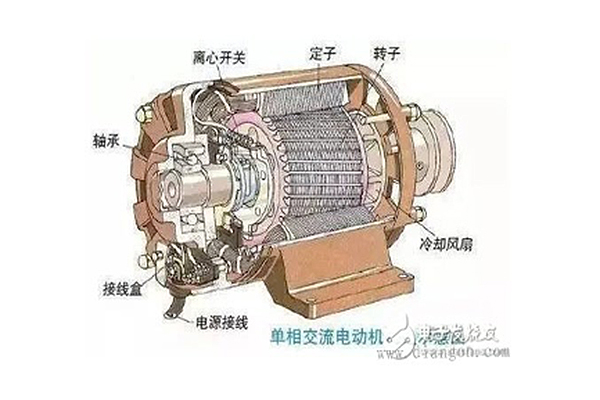 1) Motor asíncrono de inducción de CA
1) Motor asíncrono de inducción de CA
El principio de funcionamiento de un motor asíncrono inductivo de CA es que el devanado pasará a través de la ranura del estator y el rotor: está apilado por finas láminas de acero con alta conductividad magnética. La electricidad trifásica pasará por el devanado. Según la ley de inducción electromagnética de Faraday, se generará un campo magnético giratorio, que es la razón por la que gira el rotor. Las tres bobinas del estator están conectadas en un intervalo de 120 grados y el conductor por el que circula la corriente genera campos magnéticos a su alrededor. Cuando se aplica la fuente de alimentación trifásica a esta disposición especial, los campos magnéticos cambiarán en diferentes direcciones con el cambio de corriente alterna en un momento específico, generando un campo magnético con intensidad de rotación uniforme. La velocidad de rotación del campo magnético se llama velocidad sincrónica. Supongamos que se coloca un conductor cerrado en su interior, según la ley de Faraday, debido a que el campo magnético es variable, el bucle detectará la fuerza electromotriz, que generará corriente en el bucle. Esta situación es como el bucle que transporta corriente en el campo magnético, generando fuerza electromagnética en el bucle, y Huan Jiang comienza a girar. Usando algo similar a una jaula de ardilla, una corriente alterna trifásica producirá un campo magnético giratorio a través del estator, y la corriente será inducida en la barra de la jaula de ardilla en cortocircuito por el anillo del extremo, por lo que el rotor comienza a girar, lo cual es Por qué el motor se llama motor de inducción. Con la ayuda de la inducción electromagnética, en lugar de conectarse directamente al rotor para inducir electricidad, se llenan el rotor con escamas de núcleo de hierro aislante, de modo que el hierro de tamaño pequeño garantiza la pérdida mínima de corrientes parásitas.
2) motor síncrono de CA
El rotor del motor síncrono es diferente al del motor asíncrono. El imán permanente está instalado en el rotor, que se puede dividir en tipo montado en superficie y tipo integrado. El rotor está hecho de chapa de acero al silicio y el imán permanente está integrado. El estator también está conectado con una corriente alterna con una diferencia de fase de 120, que controla el tamaño y la fase de la corriente alterna de onda sinusoidal, de modo que el campo magnético generado por el estator es opuesto al generado por el rotor, y el campo magnético El campo está girando. De este modo, el estator es atraído por un imán y gira con el rotor. Ciclo tras ciclo se genera por absorción del estator y del rotor.
Conclusión: La propulsión por motor para vehículos eléctricos se ha convertido básicamente en la corriente principal, pero no es única sino diversificada. Cada sistema de accionamiento de motor tiene su propio índice completo. Cada sistema se aplica en la propulsión de vehículos eléctricos existente. La mayoría de ellos son motores asíncronos y motores síncronos de imanes permanentes, mientras que algunos intentan conmutar motores de reluctancia. Vale la pena señalar que el accionamiento por motor integra tecnología de electrónica de potencia, tecnología de microelectrónica, tecnología digital, tecnología de control automático, ciencia de materiales y otras disciplinas para reflejar la aplicación integral y las perspectivas de desarrollo de múltiples disciplinas. Es un fuerte competidor en motores de vehículos eléctricos. Para ocupar un lugar en los vehículos eléctricos del futuro, todo tipo de motores no solo necesitan optimizar la estructura del motor, sino también explorar constantemente los aspectos inteligentes y digitales del sistema de control.
Hora de publicación: 30 de enero de 2023


