
1. Introducción a los motores eléctricos
Un motor eléctrico es un dispositivo que convierte la energía eléctrica en energía mecánica. Utiliza una bobina energizada (es decir, el devanado del estator) para generar un campo magnético giratorio y actuar sobre el rotor (como un marco de aluminio cerrado con jaula de ardilla) para formar un par de rotación magnetoeléctrico.
Los motores eléctricos se dividen en motores de CC y motores de CA según las diferentes fuentes de energía utilizadas. La mayoría de los motores del sistema de energía son motores de CA, que pueden ser motores síncronos o motores asíncronos (la velocidad del campo magnético del estator del motor no mantiene la velocidad síncrona con la velocidad de rotación del rotor).
Un motor eléctrico consta principalmente de un estator y un rotor, y la dirección de la fuerza que actúa sobre el cable energizado en el campo magnético está relacionada con la dirección de la corriente y la dirección de la línea de inducción magnética (dirección del campo magnético). El principio de funcionamiento de un motor eléctrico es el efecto de un campo magnético sobre la fuerza que actúa sobre la corriente, lo que hace que el motor gire.
2. División de motores eléctricos.
① Clasificación por fuente de alimentación de trabajo
Según las diferentes fuentes de energía de trabajo de los motores eléctricos, se pueden dividir en motores de CC y motores de CA. Los motores de CA también se dividen en motores monofásicos y motores trifásicos.
② Clasificación por estructura y principio de funcionamiento.
Los motores eléctricos se pueden dividir en motores de CC, motores asíncronos y motores síncronos según su estructura y principio de funcionamiento. Los motores síncronos también se pueden dividir en motores síncronos de imanes permanentes, motores síncronos de reluctancia y motores síncronos de histéresis. Los motores asíncronos se pueden dividir en motores de inducción y motores de conmutador de CA. Los motores de inducción se dividen a su vez en motores asíncronos trifásicos y motores asíncronos de polos sombreados. Los motores de conmutador de CA también se dividen en motores excitados en serie monofásicos, motores de CA CC de doble propósito y motores repulsivos.
③ Clasificado por modo de inicio y operación
Los motores eléctricos se pueden dividir en motores asíncronos monofásicos arrancados por condensador, motores asíncronos monofásicos accionados por condensador, motores asíncronos monofásicos arrancados por condensador y motores asíncronos monofásicos de fase dividida según sus modos de arranque y funcionamiento.
④ Clasificación por finalidad
Los motores eléctricos se pueden dividir en motores de accionamiento y motores de control según su finalidad.
Los motores eléctricos para accionamiento se dividen a su vez en herramientas eléctricas (incluidas herramientas para taladrar, pulir, pulir, ranurar, cortar y expandir), motores eléctricos para electrodomésticos (incluidas lavadoras, ventiladores eléctricos, refrigeradores, aires acondicionados, grabadoras, grabadoras de vídeo, Reproductores de DVD, aspiradoras, cámaras, sopladores eléctricos, afeitadoras eléctricas, etc.) y otros equipos mecánicos pequeños en general (incluidas diversas máquinas herramienta pequeñas, maquinaria pequeña, equipos médicos, instrumentos electrónicos, etc.).
Los motores de control se dividen a su vez en motores paso a paso y servomotores.
⑤ Clasificación por estructura del rotor
Según la estructura del rotor, los motores eléctricos se pueden dividir en motores de inducción de jaula (anteriormente conocidos como motores asíncronos de jaula de ardilla) y motores de inducción de rotor devanado (anteriormente conocidos como motores asíncronos devanados).
⑥ Clasificado por velocidad de funcionamiento
Los motores eléctricos se pueden dividir en motores de alta velocidad, motores de baja velocidad, motores de velocidad constante y motores de velocidad variable según su velocidad de funcionamiento.
⑦ Clasificación por forma protectora
a. Tipo abierto (como IP11, IP22).
A excepción de la necesaria estructura de soporte, el motor no dispone de protección especial para las partes giratorias y vivas.
b. Tipo cerrado (como IP44, IP54).
Las partes giratorias y vivas dentro de la carcasa del motor necesitan la protección mecánica necesaria para evitar contactos accidentales, pero no dificulta significativamente la ventilación. Los motores de protección se dividen en los siguientes tipos según sus diferentes estructuras de ventilación y protección.
ⓐ Tipo cubierta de malla.
Las aberturas de ventilación del motor están cubiertas con cubiertas perforadas para evitar que las partes giratorias y vivas del motor entren en contacto con objetos externos.
ⓑ Resistente al goteo.
La estructura de la ventilación del motor puede evitar que líquidos o sólidos que caen verticalmente entren directamente al interior del motor.
ⓒ A prueba de salpicaduras.
La estructura de la ventilación del motor puede evitar que líquidos o sólidos entren al interior del motor en cualquier dirección dentro de un rango de ángulo vertical de 100°.
ⓓ Cerrado.
La estructura de la carcasa del motor puede impedir el libre intercambio de aire dentro y fuera de la carcasa, pero no requiere un sellado completo.
ⓔ Resistente al agua.
La estructura de la carcasa del motor puede evitar que entre agua con cierta presión al interior del motor.
ⓕ Estanco.
Cuando el motor se sumerge en agua, la estructura de la carcasa del motor puede evitar que entre agua al interior del motor.
ⓖ Estilo de buceo.
El motor eléctrico puede funcionar en agua durante mucho tiempo bajo la presión de agua nominal.
ⓗ A prueba de explosiones.
La estructura de la carcasa del motor es suficiente para evitar que la explosión de gas dentro del motor se transmita al exterior del motor, provocando la explosión de gas combustible fuera del motor. Cuenta oficial “Literatura de Ingeniería Mecánica”, ¡gasolinera de ingenieros!
⑧ Clasificado por métodos de ventilación y enfriamiento.
a. Autoenfriamiento.
Los motores eléctricos dependen únicamente de la radiación de la superficie y del flujo de aire natural para enfriarse.
b. Ventilador autoenfriado.
El motor eléctrico es accionado por un ventilador que suministra aire refrigerante para enfriar la superficie o el interior del motor.
do. Se enfrió el ventilador.
El ventilador que suministra aire de refrigeración no es accionado por el propio motor eléctrico, sino de forma independiente.
d. Tipo de ventilación por tubería.
El aire de refrigeración no se introduce ni se descarga directamente desde el exterior o el interior del motor, sino que se introduce o descarga desde el motor a través de tuberías. Los ventiladores para ventilación de tuberías pueden ser autoenfriados o enfriados por otro tipo de ventilador.
mi. Refrigeración líquida.
Los motores eléctricos se enfrían con líquido.
F. Refrigeración por gas en circuito cerrado.
La circulación del medio para enfriar el motor se realiza en un circuito cerrado que incluye el motor y el refrigerador. El medio refrigerante absorbe calor al pasar por el motor y libera calor al pasar por el enfriador.
gramo. Refrigeración superficial y refrigeración interna.
El medio de enfriamiento que no pasa por el interior del conductor del motor se llama enfriamiento superficial, mientras que el medio de enfriamiento que pasa por el interior del conductor del motor se llama enfriamiento interno.
⑨ Clasificación por forma de estructura de instalación.
La forma de instalación de los motores eléctricos suele estar representada por códigos.
El código está representado por la abreviatura IM de instalación internacional,
La primera letra en IM representa el código de tipo de instalación, B representa instalación horizontal y V representa instalación vertical;
El segundo dígito representa el código de característica, representado por números arábigos.
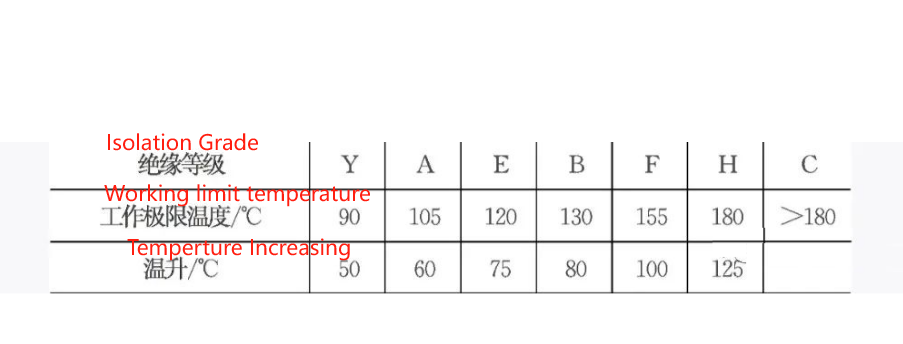
⑩ Clasificación por nivel de aislamiento
Nivel A, nivel E, nivel B, nivel F, nivel H, nivel C. La clasificación del nivel de aislamiento de los motores se muestra en la siguiente tabla.
⑪ Clasificado según horas de trabajo nominales
Sistema de trabajo continuo, intermitente y de corta duración.
Sistema de Servicio Continuo (SI). El motor garantiza un funcionamiento a largo plazo por debajo del valor nominal especificado en la placa de identificación.
Jornada reducida (S2). El motor sólo puede funcionar durante un período de tiempo limitado por debajo del valor nominal especificado en la placa de identificación. Hay cuatro tipos de estándares de duración para operaciones a corto plazo: 10 min, 30 min, 60 min y 90 min.
Sistema de trabajo intermitente (S3). El motor sólo se puede utilizar de forma intermitente y periódica por debajo del valor nominal especificado en la placa de identificación, expresado como porcentaje de 10 minutos por ciclo. Por ejemplo, FC=25%; Entre ellos, S4 a S10 pertenecen a varios sistemas operativos operativos intermitentes en diferentes condiciones.
9.2.3 Fallas comunes de los motores eléctricos.
Los motores eléctricos a menudo encuentran diversas fallas durante el funcionamiento a largo plazo.
Si la transmisión de par entre el conector y el reductor es grande, el orificio de conexión en la superficie de la brida muestra un desgaste severo, lo que aumenta el espacio de ajuste de la conexión y conduce a una transmisión de par inestable; El desgaste de la posición del rodamiento causado por daños al rodamiento del eje del motor; Desgaste entre las cabezas del eje y los chaveteros, etc. Después de la aparición de tales problemas, los métodos tradicionales se centran principalmente en la reparación mediante soldadura o mecanizado después del revestimiento con cepillo, pero ambos tienen ciertos inconvenientes.
La tensión térmica generada por la soldadura de reparación a alta temperatura no se puede eliminar por completo, que es propensa a doblarse o fracturarse; Sin embargo, el revestimiento con brocha está limitado por el grosor del revestimiento y es propenso a pelarse, y ambos métodos utilizan metal para reparar el metal, lo que no puede cambiar la relación "duro a duro". Bajo la acción combinada de varias fuerzas, aún provocará un nuevo desgaste.
Los países occidentales contemporáneos suelen utilizar materiales compuestos poliméricos como métodos de reparación para abordar estos problemas. La aplicación de materiales poliméricos para reparación no afecta la tensión térmica de la soldadura y el espesor de la reparación no está limitado. Al mismo tiempo, los materiales metálicos del producto no tienen la flexibilidad para absorber el impacto y la vibración del equipo, evitar la posibilidad de desgaste y extender la vida útil de los componentes del equipo, ahorrando mucho tiempo de inactividad a las empresas y creando un enorme valor económico.
(1) Fenómeno de falla: el motor no puede arrancar después de conectarse
Los motivos y métodos de manejo son los siguientes.
① Error de cableado del devanado del estator: verifique el cableado y corrija el error.
② Circuito abierto en el devanado del estator, cortocircuito a tierra, circuito abierto en el devanado del motor del rotor bobinado: identifique el punto de falla y elimínelo.
③ Carga excesiva o mecanismo de transmisión atascado: verifique el mecanismo de transmisión y la carga.
④ Circuito abierto en el circuito del rotor de un motor de rotor bobinado (mal contacto entre la escobilla y el anillo colector, circuito abierto en el reóstato, mal contacto en el cable, etc.): identifique el punto del circuito abierto y repárelo.
⑤ El voltaje de la fuente de alimentación es demasiado bajo: verifique la causa y elimínela.
⑥ Pérdida de fase de la fuente de alimentación: verifique el circuito y restablezca el trifásico.
(2) Fenómeno de falla: la temperatura del motor aumenta demasiado o sale humo
Los motivos y métodos de manejo son los siguientes.
① Sobrecargado o arrancado con demasiada frecuencia: reduzca la carga y reduzca el número de arranques.
② Pérdida de fase durante el funcionamiento: verifique el circuito y restablezca el trifásico.
③ Error en el cableado del devanado del estator: verifique el cableado y corríjalo.
④ El devanado del estator está conectado a tierra y hay un cortocircuito entre espiras o fases; identifique la ubicación de la conexión a tierra o del cortocircuito y repárelo.
⑤ Devanado del rotor de jaula roto: reemplace el rotor.
⑥ Operación de fase faltante del devanado del rotor bobinado: identifique el punto de falla y repárelo.
⑦ Fricción entre el estator y el rotor: verifique que los cojinetes y el rotor no estén deformados, repárelos o reemplácelos.
⑧ Mala ventilación: compruebe si la ventilación no está obstruida.
⑨ Tensión demasiado alta o demasiado baja – Compruebe la causa y elimínela.
(3) Fenómeno de falla: vibración excesiva del motor
Los motivos y métodos de manejo son los siguientes.
① Rotor desequilibrado – equilibrio de nivelación.
② Polea desequilibrada o extensión del eje doblada: comprobar y corregir.
③ El motor no está alineado con el eje de carga; verifique y ajuste el eje de la unidad.
④ Instalación incorrecta del motor: verifique los tornillos de instalación y cimentación.
⑤ Sobrecarga repentina: reduzca la carga.
(4) Fenómeno de falla: sonido anormal durante la operación
Los motivos y métodos de manejo son los siguientes.
① Fricción entre el estator y el rotor: compruebe si los cojinetes y el rotor están deformados, repárelos o reemplácelos.
② Cojinetes dañados o mal lubricados: reemplace y limpie los cojinetes.
③ Operación de pérdida de fase del motor: verifique el punto del circuito abierto y repárelo.
④ Colisión de la cuchilla con la carcasa: comprobar y eliminar las averías.
(5) Fenómeno de falla: la velocidad del motor es demasiado baja cuando está bajo carga
Los motivos y métodos de manejo son los siguientes.
① El voltaje de la fuente de alimentación es demasiado bajo; verifique el voltaje de la fuente de alimentación.
② Carga excesiva: verifique la carga.
③ Devanado del rotor de jaula roto: reemplace el rotor.
④ Contacto deficiente o desconectado de una fase del grupo de cables del rotor de bobinado: verifique la presión de las escobillas, el contacto entre las escobillas y el anillo colector y el devanado del rotor.
(6) Fenómeno de falla: la carcasa del motor está viva
Los motivos y métodos de manejo son los siguientes.
① Conexión a tierra deficiente o alta resistencia a tierra: conecte el cable de tierra de acuerdo con las regulaciones para eliminar fallas de conexión a tierra deficientes.
② Los devanados están húmedos: realice un tratamiento de secado.
③ Daño en el aislamiento, colisión de cables: sumerja pintura para reparar el aislamiento y vuelva a conectar los cables. 9.2.4 Procedimientos de operación del motor
① Antes del desmontaje, utilice aire comprimido para quitar el polvo de la superficie del motor y límpielo.
② Seleccione el lugar de trabajo para el desmontaje del motor y limpie el entorno del lugar.
③ Familiarizado con las características estructurales y requisitos técnicos de mantenimiento de los motores eléctricos.
④ Prepare las herramientas necesarias (incluidas herramientas especiales) y el equipo para el desmontaje.
⑤ Para comprender mejor los defectos en el funcionamiento del motor, se puede realizar una prueba de inspección antes del desmontaje si las condiciones lo permiten. Para ello se prueba el motor con carga, y se comprueba detalladamente la temperatura, sonido, vibración y otras condiciones de cada parte del motor. También se prueban el voltaje, la corriente, la velocidad, etc. Luego, se desconecta la carga y se realiza una prueba de inspección sin carga separada para medir la corriente sin carga y la pérdida sin carga, y se hacen registros. Cuenta oficial “Literatura de Ingeniería Mecánica”, ¡gasolinera de ingenieros!
⑥ Corte el suministro de energía, retire el cableado externo del motor y lleve registros.
⑦ Seleccione un megaóhmetro de voltaje adecuado para probar la resistencia de aislamiento del motor. Para comparar los valores de resistencia de aislamiento medidos durante el último mantenimiento para determinar la tendencia del cambio de aislamiento y el estado de aislamiento del motor, los valores de resistencia de aislamiento medidos a diferentes temperaturas deben convertirse a la misma temperatura, generalmente convertida a 75 ℃.
⑧ Pruebe la relación de absorción K. Cuando la relación de absorción K>1,33, indica que el aislamiento del motor no se ha visto afectado por la humedad o que el grado de humedad no es severo. Para comparar con los datos anteriores, también es necesario convertir la relación de absorción medida a cualquier temperatura a la misma temperatura.
9.2.5 Mantenimiento y reparación de motores eléctricos.
Cuando el motor está funcionando o no funciona correctamente, existen cuatro métodos para prevenir y eliminar fallas de manera oportuna, a saber, mirar, escuchar, oler y tocar, para garantizar el funcionamiento seguro del motor.
(1) Mira
Observe si hay alguna anomalía durante el funcionamiento del motor, que se manifiesta principalmente en las siguientes situaciones.
① Cuando el devanado del estator está en cortocircuito, es posible que se vea humo procedente del motor.
② Cuando el motor está muy sobrecargado o se desfasa, la velocidad disminuirá y habrá un fuerte "zumbido".
③ Cuando el motor funciona normalmente, pero se detiene repentinamente, pueden aparecer chispas en la conexión suelta; El fenómeno de que se funde un fusible o se atasca un componente.
④ Si el motor vibra violentamente, puede deberse a un atasco del dispositivo de transmisión, una mala fijación del motor, pernos de base flojos, etc.
⑤ Si hay decoloración, marcas de quemado y manchas de humo en los contactos internos y las conexiones del motor, indica que puede haber sobrecalentamiento local, mal contacto en las conexiones del conductor o devanados quemados.
(2) escuchar
El motor debe emitir un “zumbido” uniforme y ligero durante el funcionamiento normal, sin ruidos ni sonidos especiales. Si se emite demasiado ruido, incluido ruido electromagnético, ruido de rodamientos, ruido de ventilación, ruido de fricción mecánica, etc., puede ser un precursor o fenómeno de un mal funcionamiento.
① Para el ruido electromagnético, si el motor emite un sonido fuerte y pesado, puede haber varias razones.
a. El espacio de aire entre el estator y el rotor es desigual y el sonido fluctúa de alto a bajo con el mismo intervalo de tiempo entre los sonidos altos y bajos. Esto se debe al desgaste de los cojinetes, lo que provoca que el estator y el rotor no sean concéntricos.
b. La corriente trifásica está desequilibrada. Esto se debe a una conexión a tierra incorrecta, un cortocircuito o un mal contacto del devanado trifásico. Si el sonido es muy sordo, indica que el motor está muy sobrecargado o desfasado.
do. Núcleo de hierro suelto. La vibración del motor durante el funcionamiento hace que los pernos de fijación del núcleo de hierro se aflojen, lo que provoca que la lámina de acero al silicio del núcleo de hierro se afloje y emita ruido.
② Para detectar ruido en los rodamientos, se debe monitorear con frecuencia durante el funcionamiento del motor. El método de monitoreo consiste en presionar un extremo del destornillador contra el área de montaje del rodamiento y el otro extremo está cerca del oído para escuchar el sonido del rodamiento en funcionamiento. Si el rodamiento funciona normalmente, su sonido será un “crujido” continuo y pequeño, sin fluctuaciones de altura ni sonido de fricción del metal. Si ocurren los siguientes sonidos, se considera anormal.
a. Se produce un "chirrido" cuando el rodamiento está en marcha, que es un sonido de fricción del metal, generalmente causado por la falta de aceite en el rodamiento. El rodamiento debe desmontarse y añadirse una cantidad adecuada de grasa lubricante.
b. Si se produce un sonido “crujido”, es el sonido que se produce cuando la bola gira, normalmente provocado por el secado de la grasa lubricante o por falta de aceite. Se puede añadir una cantidad adecuada de grasa.
do. Si hay un sonido de "clic" o "crujido", es el sonido generado por el movimiento irregular de la bola en el rodamiento, que es causado por el daño de la bola en el rodamiento o el uso prolongado del motor. , y el secado de la grasa lubricante.
③ Si el mecanismo de transmisión y el mecanismo accionado emiten sonidos continuos en lugar de fluctuantes, se pueden manejar de las siguientes maneras.
a. Los ruidos periódicos de "estallido" son causados por uniones desiguales de la correa.
b. El sonido de "golpeteo" periódico es causado por un acoplamiento o polea flojos entre los ejes, así como por chaveteros o chaveteros desgastados.
do. El sonido de colisión desigual es causado por las aspas del viento que chocan con la cubierta del ventilador.
(3) Olor
Al oler el olor del motor también se pueden identificar y prevenir fallos. Si se encuentra un olor especial a pintura, indica que la temperatura interna del motor es demasiado alta; Si se encuentra un fuerte olor a quemado o quemado, puede deberse a la rotura de la capa aislante o al quemado del devanado.
(4) Toque
Tocar la temperatura de algunas partes del motor también puede determinar la causa del mal funcionamiento. Para garantizar la seguridad, se debe utilizar el dorso de la mano para tocar las partes circundantes de la carcasa del motor y los cojinetes al tocar. Si se encuentran anomalías en la temperatura, puede haber varias razones.
① Mala ventilación. Como por ejemplo desprendimiento del ventilador, conductos de ventilación bloqueados, etc.
② Sobrecarga. Provocando corriente excesiva y sobrecalentamiento del devanado del estator.
③ Cortocircuito entre devanados del estator o desequilibrio de corriente trifásica.
④ Arranque o frenado frecuentes.
⑤ Si la temperatura alrededor del rodamiento es demasiado alta, puede deberse a daños en el rodamiento o falta de aceite.
Hora de publicación: 06-oct-2023


